私はいくつかのロボット工学の運動学コードに取り組んでおり、ロジック アナライザーでタイミングを測定し、そのような最適化のゲインを測定する具体的な方法を持つことができるように、ジョイント角度を計算するための単純で意図的に最適化されていない関数を最初に書きました。固定小数点演算として。
Teensy 2.0 と Teensy 3.0 の 2 つのマイクロコントローラー ボードで遊んでいます。私は Arduino 環境を使用してそれらのコードを作成しています。2.0 は、ほとんどの Arduino と同様に、8 ビット 16MHz AVR です。3.0 は 32 ビット 48MHz ARM Cortex M4 です。
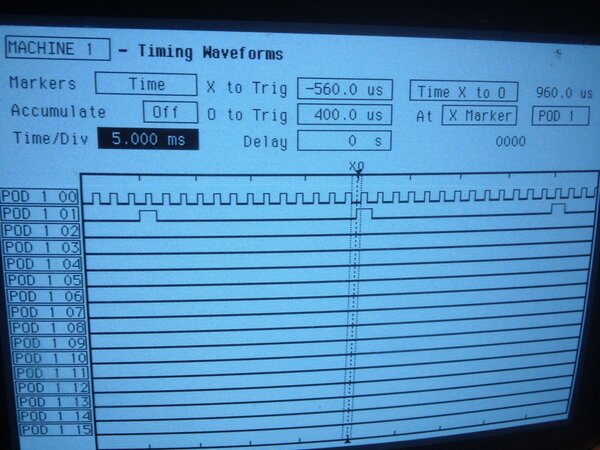
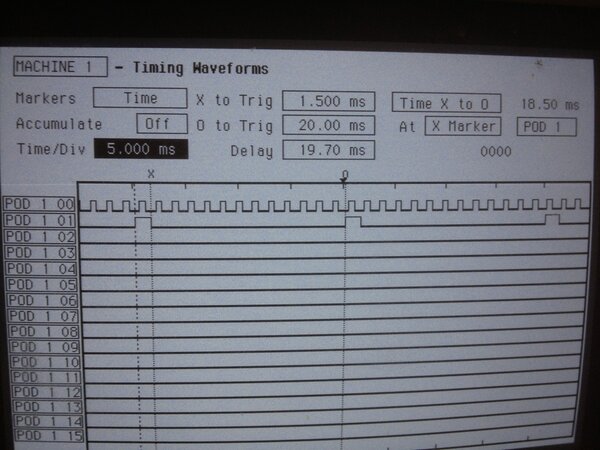
このコードは、ピンを Low に引き下げ、1 つの脚の IK 計算を実行してから、ピンを High に引き戻します。回線が低い時間を測定するために、古代のロジック アナライザーを使用しています。
奇妙なことは、ARM ボードのエッジ間の時間が大幅に長いことです。AVR は約 960us でそれを行いますが、ARM は 18.5ms ほどかかります!
これは私の心に合わない。なぜこれができるのかについての洞察を持っている人はいますか?
これが私が使用しているコードです。意図的に最適化されていないという事実を気にしないでください。おそらく私は数学が苦手ですが、それはここでの質問ではありません:)
#include <math.h>
#define lc 21.0
#define lf 40.0
#define lt 62.0
#define lfsqrd 1600.0
#define ltsqrd 3844.0
struct Vector {
double x;
double y;
double z;
};
struct Joints {
double c;
double f;
double t;
};
void calc_joints(struct Vector *foot, struct Joints *joints) {
double l1 = sqrt(pow(foot->y,2) + pow(foot->x, 2));
double l2 = l1 - lc;
double l3 = sqrt(pow(foot->z,2) + pow(l2, 2));
double tx = atan2(l2, foot->z);
double ty = acos( (pow(l3,2) + lfsqrd - ltsqrd) / (2 * l3 * lf) );
// todo: convert these from radians to degrees
joints->c = atan2(foot->y, foot->x);
joints->f = tx + ty;
joints->t = acos( (lfsqrd + ltsqrd - pow(l3,2)) / (2 * lf * lt) );
}
void setup() {
Serial.begin(9600);
pinMode(0, OUTPUT);
digitalWrite(0, HIGH);
}
void loop() {
digitalWrite(0, LOW);
struct Vector v = { 10, 20, 30 };
struct Joints j;
calc_joints(&v, &j);
digitalWrite(0, HIGH);
Serial.print(j.c);
Serial.print(", ");
Serial.print(j.f);
Serial.print(", ");
Serial.println(j.t);
}