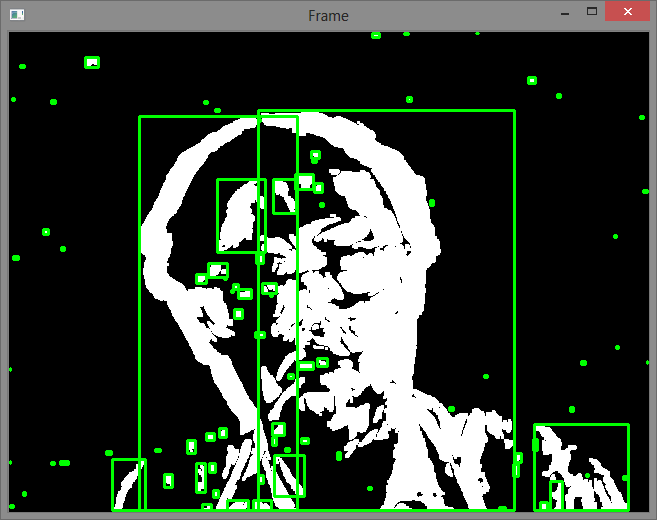
抽出された前景から各オブジェクトのソリッドブロブをセグメント化し、各オブジェクトをボックスで囲みたいと思います。しかし、私のコードは、1 つのオブジェクトのランダムなブロブを囲む多くのボックスを示しています。これは、私のブロブが 1 つのオブジェクトに対して固体ではなく、小さなブロブも多数あるためです。
ここに私のコードがあります:
#include"stdafx.h"
#include<vector>
#include<iostream>
#include<opencv2/opencv.hpp>
#include<opencv2/core/core.hpp>
#include<opencv2/imgproc/imgproc.hpp>
#include<opencv2/highgui/highgui.hpp>
int main(int argc, char *argv[])
{
cv::Mat frame;
cv::Mat fg;
cv::Mat thresholded;
cv::Mat thresholded2;
cv::Mat result;
cv::Mat bgmodel;
cv::namedWindow("Frame");
cv::namedWindow("Background Model");
cv::VideoCapture cap(0);
cv::BackgroundSubtractorMOG2 bgs;
bgs.nmixtures = 2;
bgs.history = 60;
bgs.varThreshold = 15;
bgs.bShadowDetection = true;
bgs.nShadowDetection = 0;
bgs.fTau = 0.5;
std::vector<std::vector<cv::Point>> contours;
for(;;)
{
cap >> frame;
cv::blur(frame,frame,cv::Size(10,10));
bgs.operator()(frame,fg);
bgs.getBackgroundImage(bgmodel);
cv::erode(fg,fg,cv::Mat());
cv::dilate(fg,fg,cv::Mat());
cv::threshold(fg,thresholded,70.0f,255,CV_THRESH_BINARY);
cv::threshold(fg,thresholded2,70.0f,255,CV_THRESH_BINARY);
cv::findContours(thresholded,contours,CV_RETR_EXTERNAL,CV_CHAIN_APPROX_NONE);
cv::cvtColor(thresholded2,result,CV_GRAY2RGB);
int cmin= 50;
int cmax= 10000;
std::vector<std::vector<cv::Point>>::iterator itc=contours.begin();
while (itc!=contours.end()) {
if (itc->size() < cmin || itc->size() > cmax){
itc= contours.erase(itc);} else{
std::vector<cv::Point> pts = *itc;
cv::Mat pointsMatrix = cv::Mat(pts);
cv::Scalar color( 0, 255, 0 );
cv::Rect r0= cv::boundingRect(pointsMatrix);
cv::rectangle(result,r0,color,2);
++itc;
}
}
cv::imshow("Frame",result);
cv::imshow("Background Model",bgmodel);
if(cv::waitKey(30) >= 0) break;
}
return 0;
}
結果は次のとおりです: フレーム
{kind=link}
では、抽出された前景から見つかった各オブジェクトのソリッドブロブをセグメント化し、ボックスでオブジェクトを 1 つずつ境界付けるにはどうすればよいでしょうか?
固体の塊は、次のような固体の白い塊を意味します: xxx
ここで何か助けていただければ幸いです。
NB: 下手な英語で申し訳ありません。:)
=================
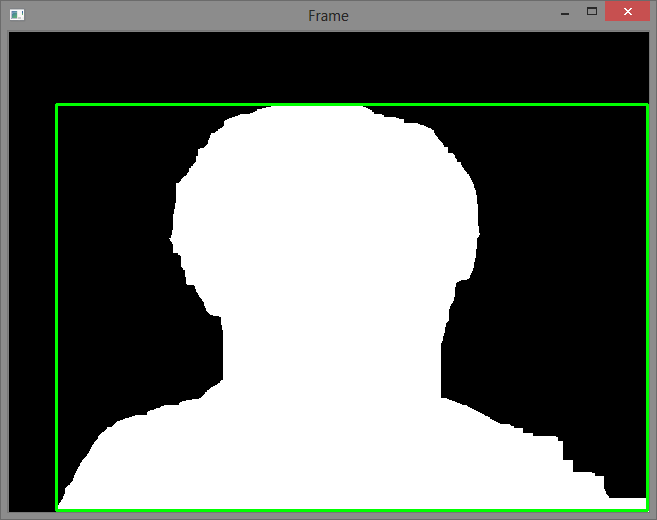
これは私の編集されたコードです!
#include"stdafx.h"
#include<vector>
#include<iostream>
#include<opencv2/opencv.hpp>
#include<opencv2/core/core.hpp>
#include<opencv2/imgproc/imgproc.hpp>
#include<opencv2/highgui/highgui.hpp>
int main(int argc, char *argv[])
{
cv::Mat frame;
cv::Mat fg;
cv::Mat blurred;
cv::Mat thresholded;
cv::Mat thresholded2;
cv::Mat result;
cv::Mat bgmodel;
cv::namedWindow("Frame");
cv::namedWindow("Background Model");
cv::VideoCapture cap(0);
cv::BackgroundSubtractorMOG2 bgs;
bgs.nmixtures = 2;
bgs.history = 60;
bgs.varThreshold = 15;
bgs.bShadowDetection = true;
bgs.nShadowDetection = 0;
bgs.fTau = 0.5;
std::vector<std::vector<cv::Point>> contours;
for(;;)
{
cap >> frame;
cv::blur(frame,blurred,cv::Size(10,10));
bgs.operator()(blurred,fg);
bgs.getBackgroundImage(bgmodel);
cv::threshold(fg,thresholded,70.0f,255,CV_THRESH_BINARY);
cv::threshold(fg,thresholded2,70.0f,255,CV_THRESH_BINARY);
cv::Mat element50(50,50,CV_8U,cv::Scalar(1));
cv::morphologyEx(thresholded,thresholded,cv::MORPH_CLOSE,element50);
cv::morphologyEx(thresholded2,thresholded2,cv::MORPH_CLOSE,element50);
cv::findContours(thresholded,contours,CV_RETR_EXTERNAL,CV_CHAIN_APPROX_SIMPLE);
cv::cvtColor(thresholded2,result,CV_GRAY2RGB);
int cmin= 50;
int cmax= 10000;
std::vector<std::vector<cv::Point>>::iterator itc=contours.begin();
while (itc!=contours.end()) {
if (itc->size() < cmin || itc->size() > cmax){
itc= contours.erase(itc);} else{
std::vector<cv::Point> pts = *itc;
cv::Mat pointsMatrix = cv::Mat(pts);
cv::Scalar color( 0, 255, 0 );
cv::Rect r0= cv::boundingRect(pointsMatrix);
cv::rectangle(result,r0,color,2);
++itc;
}
}
cv::imshow("Frame",result);
cv::imshow("Background Model",bgmodel);
if(cv::waitKey(30) >= 0) break;
}
return 0;
}
結果はこちら: FRAME
{kind=link}
elacticに感謝します。:)