AM335x の PRU ユニットの 1 つを使用して、BeagleBone の 4 つの GPIO ピン (GPIO1_2、GPIO1_3、GPIO1_6、GPIO1_7) を駆動しており、エッジ遷移を同期させたい (私の完全なソース コードは下部にあります)。
Beaglebone でピンの出力を HI に設定するには、対応するビットをアドレス 0x4804c194 で 1 に設定し、LO に設定するには、アドレス 0x4804c190 でビットを 1 に設定します。したがって、私の PRU アセンブリ コードは最初に出力 HI ビットを設定し、次に出力 LO ビットを設定します。
MOV r4, GPIO1 | GPIO_CLEARDATAOUT
MOV r5, GPIO1 | GPIO_SETDATAOUT
...
...
//Loop the following:
MAIN_LOOP:
LBCO r2, CONST_PRUDRAM, r1, 8//Read in LO and HI data into r2/r3
SBBO r3, r5, 0, 1 //Write HI data
SBBO r2, r4, 0, 1 //Write LO data
ADD r1, r1, 8
QBEQ EXIT, r1, 112 //Done? Exit
QBA MAIN_LOOP
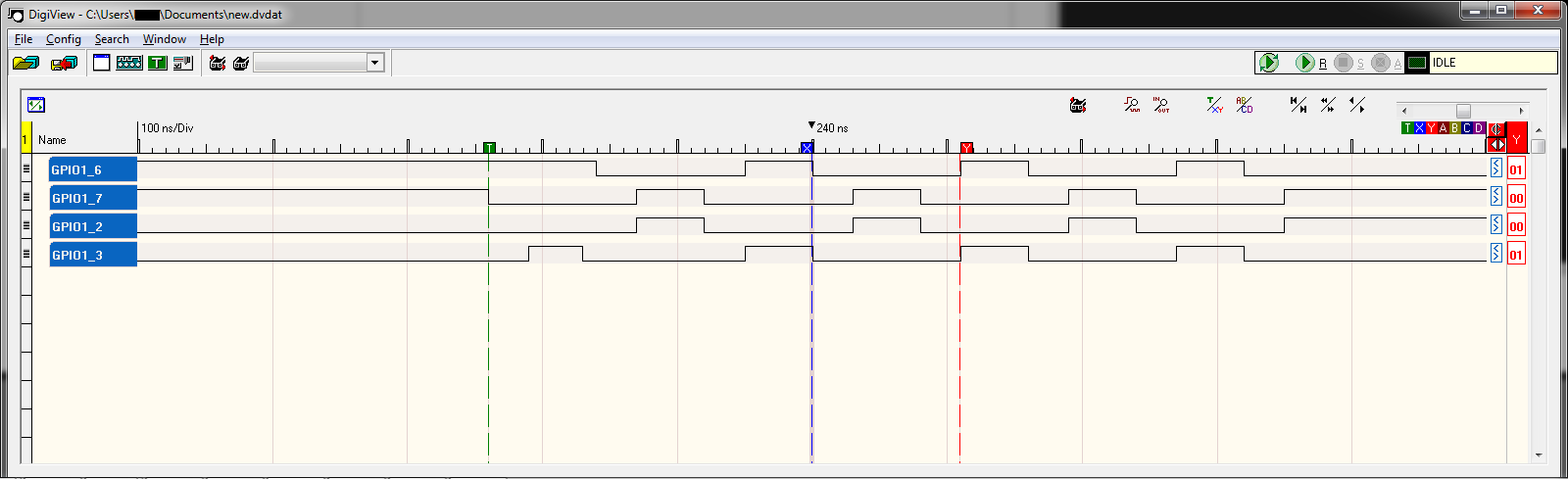
それぞれを実行するのに何サイクルかかるかにより、LO 期間は HI 期間よりも大幅に長くなります (50ns 対 110ns)。残念ながら、私は画像を投稿するには新しすぎるため、前のコードからのロジック アナライザーのスクリーンショットへのリンクを次に示します。
{kind=link}
タイムアウトを均等にするために、HI ビットと LO ビットを交互に設定して、期間が 80ns で等しくなるようにしますが、HI と LO の遷移は互いに 80ns オフセットします。
MOV r4, GPIO1 | GPIO_CLEARDATAOUT
MOV r5, GPIO1 | GPIO_SETDATAOUT
...
...
//Loop the following:
MAIN_LOOP:
LBCO r2, CONST_PRUDRAM, r1, 8 //Read in LO and HI data into r2/r3
SBBO r3, r5, 0, 1 //Write HI data
SBBO r2, r4, 0, 1 //Write LO data
ADD r1, r1, 8
QBEQ EXIT, r1, 112
QBA MAIN_LOOP2
MAIN_LOOP2:
LBCO r2, CONST_PRUDRAM, r1, 8 //Read in LO and HI data into r2/r3
SBBO r2, r4, 0, 1 //Write LO data
SBBO r3, r5, 0, 1 //Write HI data
ADD r1, r1, 8
QBEQ EXIT, r1, 112
QBA MAIN_LOOP
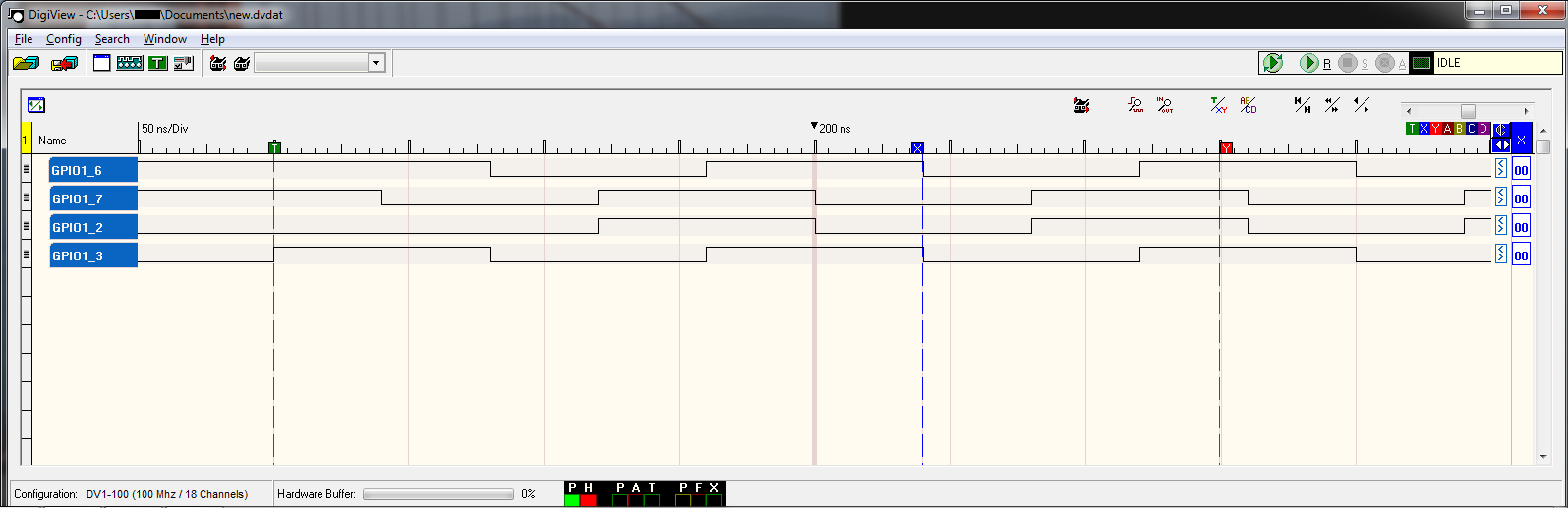
ここにも、前のコードのロジック アナライザーのスクリーンショットがあります。
{kind=link}
私の質問は、エッジ遷移を同時に発生させるにはどうすればよいですか? つまり、GPIO1_6 と GPIO_7 を比較すると、スクリーンショットの中央にあるのは、GPIO1_7 が LO に遷移したときに 200ns で、GPIO1_6 が HI に遷移する 50ns 前です。両方を同時に遷移させたいと思います。これを達成するために速度を落としてもかまいません。
ここに私のソースコードがあります:
ファイル: main.p
.origin 0
.entrypoint START
#include "main.hp"
#define GPIO1 0x4804c000
#define PINMUX 0x44E10800
#define GPIO_CLEARDATAOUT 0x190
#define GPIO_SETDATAOUT 0x194
#define GPIO_DIRECTION 0x134
#define GPIO_DIRECTION2 0x142
START:
//clear STANDBY_INIT bit
LBCO r0, C4, 4, 4
CLR r0, r0, 4
SBCO r0, C4, 4, 4
//TODO SET the pin(s) direction to OUTPUT, currently sets ALL bits to output
MOV r4, GPIO1 | GPIO_DIRECTION
MOV r7, 0x00000000
SBBO r7, r4, 0, 4
MOV r4, GPIO1 | GPIO_DIRECTION2
SBBO r7, r4, 0, 4
//TODO SET the pins to GPIO Mode aka MODE 7, i.e. GPIO1_6 to mode GPIO1_6
MOV r4, GPIO1 | GPIO_CLEARDATAOUT
MOV r5, GPIO1 | GPIO_SETDATAOUT
//Read in number of patterns into R20
LBCO r20, CONST_PRUDRAM, 0, 4
//Set R1 to 4bytes
MOV r1, 32
MAIN_LOOP:
//Read pin data into r2/r3
LBCO r2, CONST_PRUDRAM, r1, 8
//Set Pin outputs by writing to the GPIO1 memory
//SBBO r2, r4, 0, 8
SBBO r3, r5, 0, 1
SBBO r2, r4, 0, 1
//Increment Pin Data to next 8 bytes
ADD r1, r1, 8
//Check if done, after 80bytes
QBEQ EXIT, r1, 112
QBA MAIN_LOOP2
//QBA MAIN_LOOP //To get first screenshot, comment line before & uncomment this
MAIN_LOOP2:
//Read pin data into r2/r3
LBCO r2, CONST_PRUDRAM, r1, 8
//Set Pin outputs by writing to the GPIO1 memory
//SBBO r2, r4, 0, 8
SBBO r2, r4, 0, 1
SBBO r3, r5, 0, 1
//Increment Pin Data to next 8 bytes
ADD r1, r1, 8
//Check if done, after 80bytes
QBEQ EXIT, r1, 112
QBA MAIN_LOOP
EXIT:
#ifdef AM33XX
// Send notification to Host for program completion
MOV R31.b0, PRU0_ARM_INTERRUPT+16
#else
MOV R31.b0, PRU0_ARM_INTERRUPT
#endif
HALT
ファイル main.c:
#include <stdio.h>
// Driver header file
#include <prussdrv.h>
#include <pruss_intc_mapping.h>
#define PRU_NUM 0
#define AM33XX
static int LOCAL_exampleInit ();
static void *pruDataMem;
static unsigned int *pruDataMem_int;
int main (void)
{
unsigned int pindata[12];
unsigned int pinmask = 0;
int j = 0;
unsigned int ret, i;
tpruss_intc_initdata pruss_intc_initdata = PRUSS_INTC_INITDATA;
/* Initialize the PRU */
printf("\nINFO: Starting %s.\r\n", "main");
prussdrv_init ();
/* Open PRU Interrupt */
ret = prussdrv_open(PRU_EVTOUT_0);
if (ret)
{
printf("prussdrv_open open failed\n");
return (ret);
}
/* Get the interrupt initialized */
prussdrv_pruintc_init(&pruss_intc_initdata);
/* Initialize memory */
printf("\tINFO: Initializing.\r\n");
LOCAL_Init();
pruDataMem_int[0] = 10; //ignored
//Load up the pin data
pruDataMem_int[4] = 0x88;
pruDataMem_int[5] = 0x44;
pruDataMem_int[6] = 0x44;
pruDataMem_int[7] = 0x88;
pruDataMem_int[8] = 0x88;
pruDataMem_int[9] = 0x44;
pruDataMem_int[10] = 0x44;
pruDataMem_int[11] = 0x88;
pruDataMem_int[12] = 0x88;
pruDataMem_int[13] = 0x44;
pruDataMem_int[14] = 0x44;
pruDataMem_int[15] = 0x88;
pruDataMem_int[16] = 0x88;
pruDataMem_int[17] = 0x44;
pruDataMem_int[18] = 0x44;
pruDataMem_int[19] = 0x88;
pruDataMem_int[20] = 0x88;
pruDataMem_int[21] = 0x44;
pruDataMem_int[22] = 0x44;
pruDataMem_int[23] = 0x88;
printf("\tINFO: Executing PRU.\r\n");
prussdrv_exec_program (PRU_NUM, "main.bin");
// Wait until PRU0 has finished execution
printf("\tINFO: Waiting for HALT command.\r\n");
prussdrv_pru_wait_event (PRU_EVTOUT_0);
printf("\tINFO: PRU completed transfer.\r\n");
prussdrv_pru_clear_event (PRU0_ARM_INTERRUPT);
// Disable PRU and close memory mapping
prussdrv_pru_disable (PRU_NUM);
prussdrv_exit ();
return(0);
}
static int LOCAL_Init ()
{
prussdrv_map_prumem (PRUSS0_PRU0_DATARAM, &pruDataMem);
pruDataMem_int = (unsigned int) pruDataMem;
pruDataMem_int[0] = 0x00;
pruDataMem_int[1] = 0x00;
pruDataMem_int[2] = 0x00;
pruDataMem_int[3] = 0x00;
return(0);
}
ファイル main.hp:
#ifndef _main_HP_
#define _main_HP_
#define AM33XX
#ifdef AM33XX
// Refer to this mapping in the file - \prussdrv\include\pruss_intc_mapping.h
#define PRU0_PRU1_INTERRUPT 17
#define PRU1_PRU0_INTERRUPT 18
#define PRU0_ARM_INTERRUPT 19
#define PRU1_ARM_INTERRUPT 20
#define ARM_PRU0_INTERRUPT 21
#define ARM_PRU1_INTERRUPT 22
#define CONST_PRUDRAM C24
#define CONST_SHAREDRAM C28
#define CONST_L3RAM C30
#define CONST_DDR C31
// Address for the Constant table Programmable Pointer Register 0(CTPPR_0)
#define CTBIR_0 0x22020
// Address for the Constant table Programmable Pointer Register 0(CTPPR_0)
#define CTBIR_1 0x22024
// Address for the Constant table Programmable Pointer Register 0(CTPPR_0)
#define CTPPR_0 0x22028
// Address for the Constant table Programmable Pointer Register 1(CTPPR_1)
#define CTPPR_1 0x2202C
#else
// Refer to this mapping in the file - \prussdrv\include\pruss_intc_mapping.h
#define PRU0_PRU1_INTERRUPT 32
#define PRU1_PRU0_INTERRUPT 33
#define PRU0_ARM_INTERRUPT 34
#define PRU1_ARM_INTERRUPT 35
#define ARM_PRU0_INTERRUPT 36
#define ARM_PRU1_INTERRUPT 37
#define CONST_PRUDRAM C3
#define CONST_HPI C15
#define CONST_DSPL2 C28
#define CONST_L3RAM C30
#define CONST_DDR C31
// Address for the Constant table Programmable Pointer Register 0(CTPPR_0)
#define CTPPR_0 0x7028
// Address for the Constant table Programmable Pointer Register 1(CTPPR_1)
#define CTPPR_1 0x702C
#endif
.macro LD32
.mparam dst,src
LBBO dst,src,#0x00,4
.endm
.macro LD16
.mparam dst,src
LBBO dst,src,#0x00,2
.endm
.macro LD8
.mparam dst,src
LBBO dst,src,#0x00,1
.endm
.macro ST32
.mparam src,dst
SBBO src,dst,#0x00,4
.endm
.macro ST16
.mparam src,dst
SBBO src,dst,#0x00,2
.endm
.macro ST8
.mparam src,dst
SBBO src,dst,#0x00,1
.endm
#define sp r0
#define lr r23
#define STACK_TOP (0x2000 - 4)
#define STACK_BOTTOM (0x2000 - 0x200)
.macro stack_init
mov sp, STACK_BOTTOM
.endm
.macro push
.mparam reg, cnt
sbbo reg, sp, 0, 4*cnt
add sp, sp, 4*cnt
.endm
.macro pop
.mparam reg, cnt
sub sp, sp, 4*cnt
lbbo reg, sp, 0, 4*cnt
.endm
#endif //_main_HP_