私は、ユーザーが画像上の特定の点を識別し、それらの各点に関連付けられた実世界の座標を指定することで画像を登録できるようにする .NET プログラムを作成しています。
http://www.ironbyte.ca/temp/mountain.jpg
画像登録プロセスでは、ユーザーはカメラの座標も指定する必要があります。
画像が登録された後にできるようにしたいのは、実際の座標に基づいて画像上に他のポイントを描画することです。
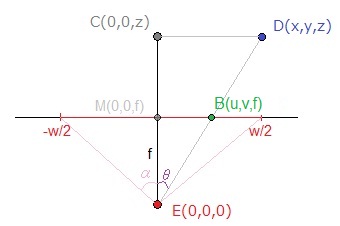
私は透視投影について多くのことを読んできましたが、物事を機能させるのに苦労しています。私の数学のスキルは、闘争の一部であるべきものではないことを認めなければなりません. 私が立ち往生している場所は、焦点距離とディスプレイ表面までの距離を決定しようとしています:
この記事ではビューアーの位置 (e [x,y,z]) と呼びます: http://en.wikipedia.org/wiki/3D_projection#Perspective_projection
この記事も参照しています: http://www.shotlink.com/Tour/WebTemplate/shotlinknew.nsf/2c47cc31e412bc4985256e6e00287832/c1743b40acf6aa03852575b7007122b0/$FILE/Plotting%203D%20ShotLink%20Data%20%on%202D視野から焦点距離を抽出する .pdf は、事前にわかっているように見えますが、私の場合はそうではありません。
私の質問は、逆に作業して、画像上の既知の点の位置に基づいて焦点距離や視野を決定する方法はありますか? それとも、これを間違った方法で見ていて、最終目標を達成するためのより簡単な方法があるのでしょうか?

{kind=link}