ポイント、速度、方向からなるベクトルがあります。このベクトルを R と呼びます。そして、点と速度だけで構成される別のベクトルです。方向がありません。これを T と呼びます。今、私がやろうとしているのは、これら 2 つのベクトルの最短交点を見つけることです。T には方向がないため、これは難しいことがわかります。CaRMetal で機能する数式を作成できましたが、Python では機能しません。誰かがこの問題を解決するためのより効率的な方法を提案できますか? または、X の既存の式を解きますか?
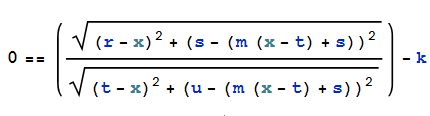
方式:

(ソース: bja888.com )
{kind=link}
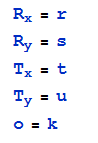
鍵:

(ソース: bja888.com )
{kind=link}
ここで、o または k はベクトル間の速度差です。R.スピード / T.スピード